↑top
Running Magni in Simulation
The Magni simulator utilizes the full desktop install of ROS Kinetic, plus components of the magni-robot distribution from Ubiquity robotics. The simulator runs a virtual magni within the Gazibo simulator and allows development without a physical robot.
Prerequisites
We suggest your workstation be a machine with a Nvidia GPU display running Ubuntu 16.04. You can verify the required components are present by looking for required files
$ roscd magni_gazebo
$ ls
CHANGELOG.rst CMakeLists.txt config launch media package.xml urdf
If the above commands fail or the list of files is not found you will need to add the components required for Magni simulation in Gazebo.
Running ROS Melodic for simulation
As of early 2021 you could run Ubuntu 18.04 with ROS Melodic and still use the process on this page.
If you did that you would have to use the word ‘melodic’ for every place in every command that used ‘kinetic’.
Adding the required Components
Install catkin
Catkin may already have been installed, but if so this will do no harm.
~$ sudo apt-get install ros-kinetic-catkin
Make Catkin Folders And Run catkin_make
~$ mkdir -p ~/catkin_ws/src
~$ cd catkin_ws
~/catkin_ws$ catkin_make
Source the Setup.bash file
~/catkin_ws$ source devel/setup.bash
Install gazebo
~/catkin_ws$ sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
Download the Gazebo ROS Packages
Make catkin_ws/src the current directory.
~/catkin_ws/src$ git clone https://github.com/ros-simulation/gazebo_ros_pkgs.git -b kinetic-devel
Install libgazebo and Check the Dependencies
Looks like this has already been done!
~/catkin_ws$ sudo apt-get install -y libgazebo7-dev
~/catkin_ws$ rosdep check --from-paths . --ignore-src --rosdistro kinetic
After you run this you may find you need ros_navigation and other modules. You may have to do sudo apt install ros-kinetic-xxxxx for those where xxxx may perhaps be ‘navigation’ and other modules.
You may also need our OLED repository as of mid 2020
~/catkin_ws/src$ git clone https://github.com/UbiquityRobotics/oled_display_node
Run Catkin Make
This may take rather a long time.
~/catkin_ws$ catkin_make
Add the Required Lines to setup.bash
Ensure that the last few lines in your ~/.bashrc look like this:
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.bash
export ROS_HOSTNAME=`cat /etc/hostname`.local
Now get the Magni Gazebo Software
Make catkin_ws/src the current directory. Then from catkin_ws, check the dependencies.
~/catkin_ws/src$ git clone http://github.com/ubiquityrobotics/magni_robot
~/catkin_ws$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
Run Catkin Make Again
~/catkin_ws$ catkin_make
This completes the installation of the prerequisites.
Run Gazebo
In a new terminal, launch rviz and gazebo_ros_pkgs
$ roslaunch magni_gazebo empty_world.launch
When empty_world.launch starts it will start 3 windows–Rviz, Gazebo, and a control pad.
{kind=link}
{kind=link}
{kind=link}
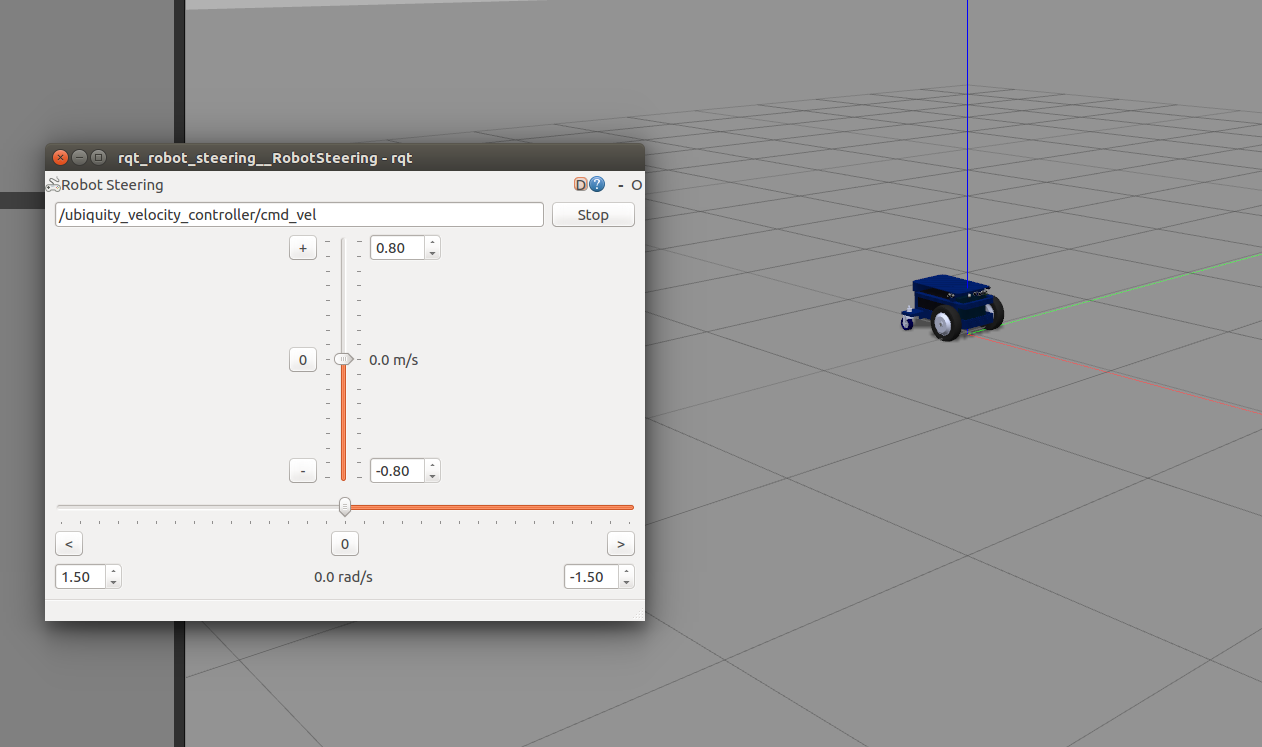
The Desktop with Gazebo and the Velocity Controller App opened.
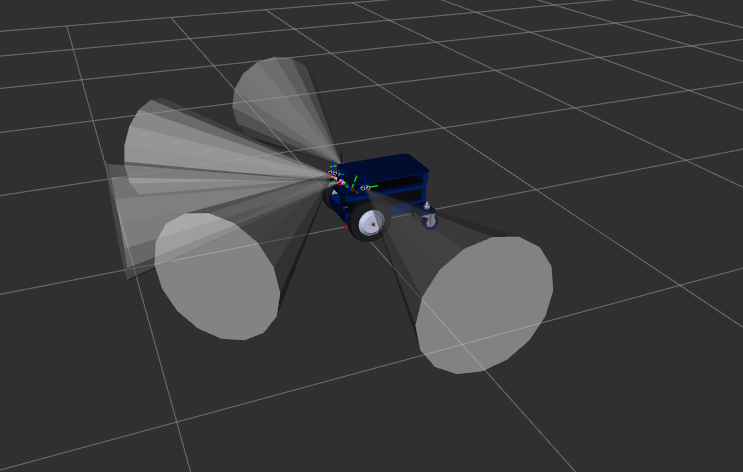
Magni in Rviz showing ping sensor cones.